The Computer Vision Emergency Response Toolkit is a free Windows application that allows emergency responders to apply detection and noise reduction algorithms to UAV imagery. It runs on a Windows machine rather than in the Cloud so that responders can avoid having to upload large image sets. The toolkit incorporates algorithms developed by students at Texas A&M under the direction of the Humanitarian Robotics and AI Laboratory and the Center for Robot-Assisted Search and Rescue and is expected to continue to expand and improve.
What can the toolkit do now? The current functions supported are:
- RX Spectral Detection Algorithm
- Debris Detection Algorithm
- Dehaze Algorithm
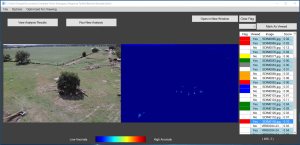
How does it work? See demo video of how the user interface works. Once the toolkit has been downloaded, users can run an analysis by selecting a single image, a set of images, or a folder of images through the interface provided. Upon completion of the analysis of the image(s), users can view the features of interest side-by-side with the original image, also through the interface provided. The ability to view analysis results and their respective image heatmap pairs is available anytime, even while an analysis is running. Results are displayed in a table on the right for a quick and easy way of navigating through the images. The table provides some basic organizational tools, such as flagging an image with a color, marking an image as viewed, and sorting the table by column. See the user manual for more details.
What kind of computer is needed? System requirements:
- 64-bit processor
- Internet connection is required during installation only
- 8 gigabyte (GB) RAM or more
- 2.5 gigahertz (GHz) quad-core processor
- Windows 7 or 10 (64-bit)
- Python 3.6.4 (64-bit)
- Microsoft .NET Framework 4.6.1
(Registration/Login is required to download this software)
If you are a researcher and want to add your algorithm(s) to this toolkit, please contact info AT crasar.org.